
ROBOTREX RT52 + RT96
1. Robo-Trex replaceable gripper
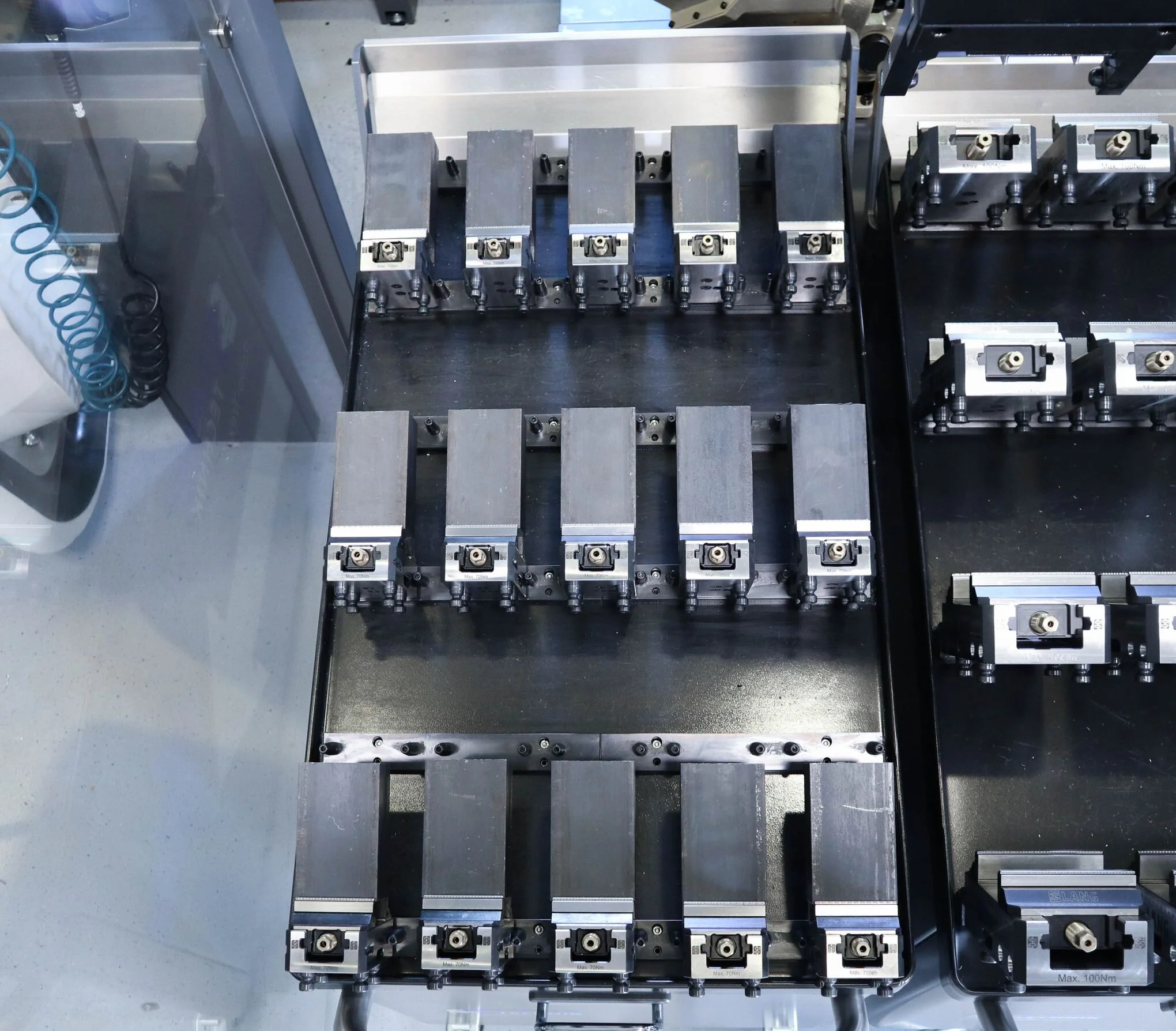
Robo-Trex 96 is equipped by standard with a replaceable gripper that allows the use of Makro-Grip 125 and 77 vices.
2. New software options for a more flexible production of larger and single parts
When we started to develop the Robo-Trex system our primary aim was to offer a simple system that can be operated by everyone.
Accordingly it was not planned to run different parts on the trolleys by standard since it requires often a complex administration software. Although it was possible by some other measures nevertheless (e.g. touch probe), we were continuously asked to implement an own intra-system solution.
The first step was an option that enabled the user to run one type of parts per trolley (item 66780) if the machine’s interface is able to handle this option.
Additionally an option was available to start not only from “vice no. 1” but at any other position on the trolley.
Now there are 3 more options available:
2.1 Defining Start- and End-position
Whilst only the start position could has been defined freely so far, it is possible now to define also the end position on the trolley.
Please see picture 01 below attached for an example picture.
This option is standard for all units ordered from now. So there is no need to order it separately.

Picture 01
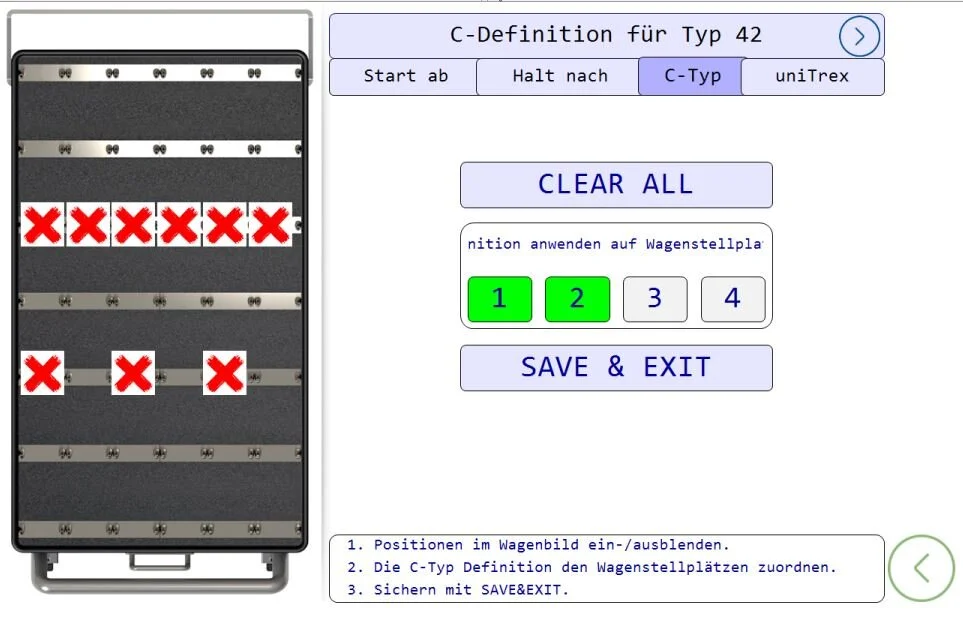
2.2 Deselection of vice slots and rows
If the customer wanted to run oversized workpieces until now there was only the possibility to leave slots and rows unused. Nevertheless the robot went over these rows trying to detect vices.
This method could have caused troubles, in particular when tall parts have been clamped in the vices. In this case the optical sensor could have identified the part as a vice and so would try to pick it up.
For a more flexible set-up on the trolley, single vice slots and complete rows can be deselected easily with the operation panel. This configuration can also be copied to other trolleys or they can be configured differently.
See pictures 02.1 and 02.2 for reference.
Picture 02.1
Picture 02.2
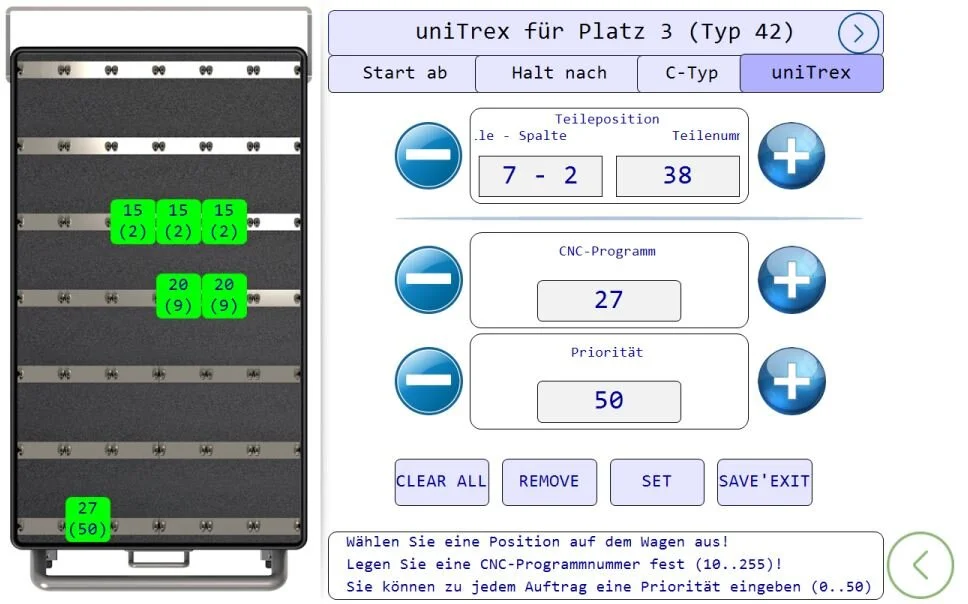
2.3 Jobmanager
This choice represents the prime option to run a flexible configuration. Every single vice slot can be allocated with an individual CNC programme. Furthermore the sequence the robot is picking up the vices from the trolley can be defined freely and randomly.
The programming is also done with the operating panel. Please see pictures 03.1 and 03.2 for reference.
Please note that this options requires a Profibus interface and a corresponding automation interface in the machine-tool. Of course we can check the feasibility with machine’s documentation and with our contact persons from the manufacturer.
Please note that these options can be realised only for newly ordered systems.

picture 03.1
Picture 03.2
3. Changes.
We will use only one type of gripper for the RT52 systems in the future.
The mechanic gripper as you have known it (see picture 66801_old below) will be available only for “self-made” systems. If your customer prefers the mechanic 0-point plate we’ll use the pneumatic gripper without the air connector (see picture 66930_new).

Picture 66801_old

picture 66930_new
4. Checklist and Payback Calculation
Checklist + Payback Calculator updates.
For any further questions please do not hesitate to come back us.